Chapter 2 - Basic Movement 1
Video Walkthrough of Basic Movement 1
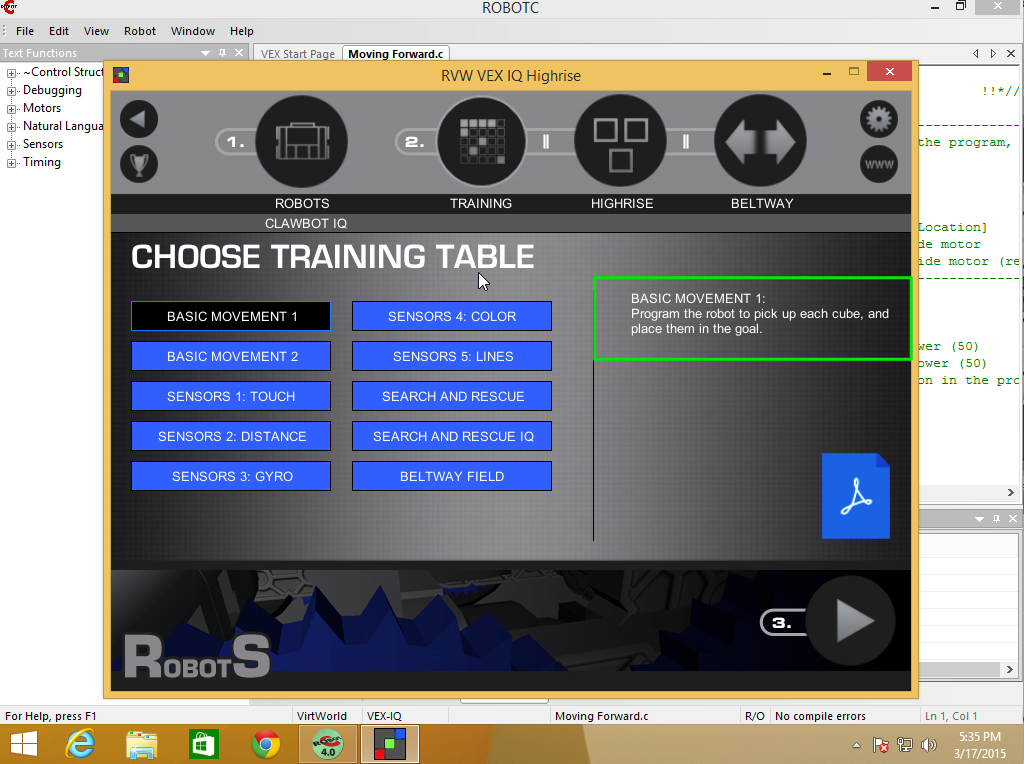
If you look at the Training Table selection screen in Robot Virtual Worlds you’ll see that the description for Basic Movement 1 is:
Program the robot to pick up each cube, and place them in the goal.
Thinking
Programming isn’t about jumping right in and typing. You should spend some time thinking about what it is you need to do. So let’s think about what we need to do just to get the first green block to goal.
- Move forward, some distance
- Grab the cube
- Raise the arm
- Make a U-Turn
- Move forward (back to goal), some distance
- Open the claw to drop the cube
It helps to lay out your steps in short phrases that anyone should be able to understand. Not only does it make it easier to discuss your Idea with your teammates but it also makes it easier for Judges to understand what you’re trying to do.
HINT: Working in small steps and checking each step as you go is so much easier than trying to do everything all at once.
So, let’s get started, one small step at a time.
Move Forward
The first thing we need to do is get our robot close to the cube, we even said “Move Forward”, so that sounds like a good method to make.
Note: There are lots of synonyms for function, including method and subroutine. I’ll mostly use function and method.
So let’s start out with a stub to our method:
void moveForward(float inches) { // method body will go here }
A stub is just a skeleton or placeholder for what we’ll write later.
One black square on the VEX IQ field is 12"x12", so conveniently we can count from the black square where our claw is to where the green cube is and figure out that we need to go 3 feet.
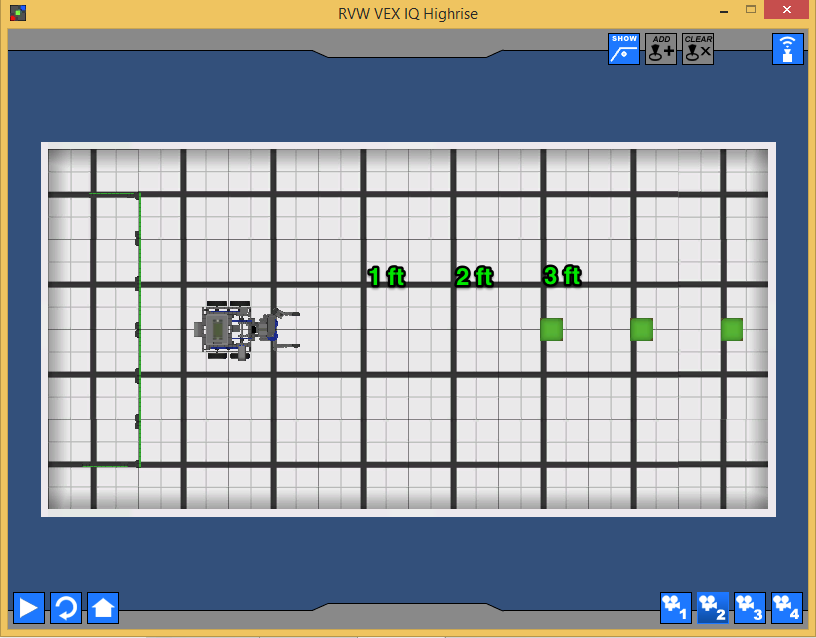
3 feet is a fairly big number when we’re talking about only an 8 foot table, so we’ll convert to inches meaning: We need to move our robot forward 36 inches (3 feet * 12 inches/feet = 36 inches).
Figuring out how to make our robot move is something we’ve been doing for a while, it basically boils down to the following formula:
distance travelled = number of rotations * wheel circumference
We only have one equation, so we can only sole for one variable. We know distance travelled, that’s 36 inches, we can figure out wheel circumference, so that leaves only number of rotations which we’ll solve for.
Let’s start with circumference, there are a few forumlas we can use:
- circumference = 2πr
- circumference = πd
The diameter is given to use in the Robot Virtual Worlds Home Screen where we did Robot Selection:
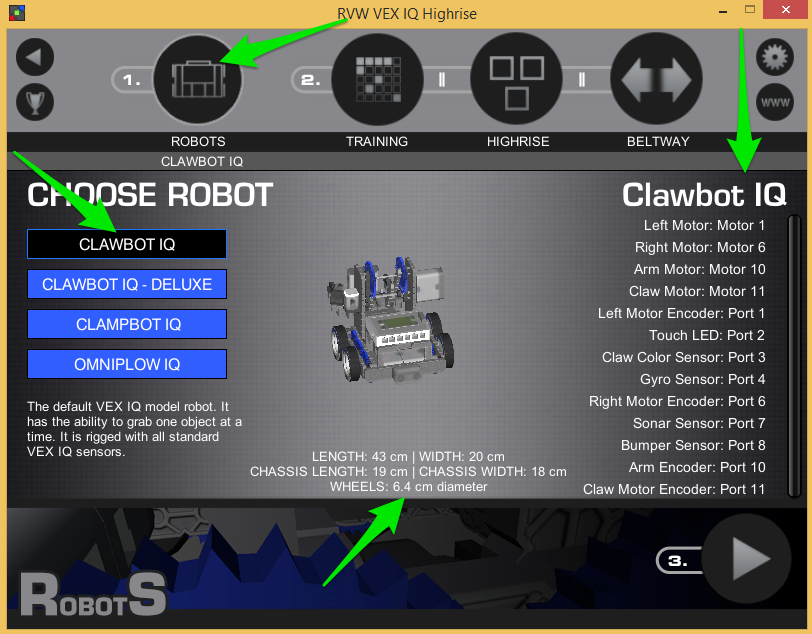
Our wheel diameter is 6.4 cm. Great, but we’re working in inches, so we need to convert cm to inches. That conversion looks like:
6.4 cm * 1 in / 2.54 cm = 2.52 in
So our wheel diameter in inches is 2.52 in
Now we have all the pieces to figure out how many rotations we need to go, but we’re going to let the computer solve that problem for us:
void moveForward(float inches) { float circumference = 2.52 * PI; float rotations = inches / circumference; }
So at this point, if we called moveForward(36) in our task main() we should end up with rotations = 4.55.
Can we make this robot move yet or what????
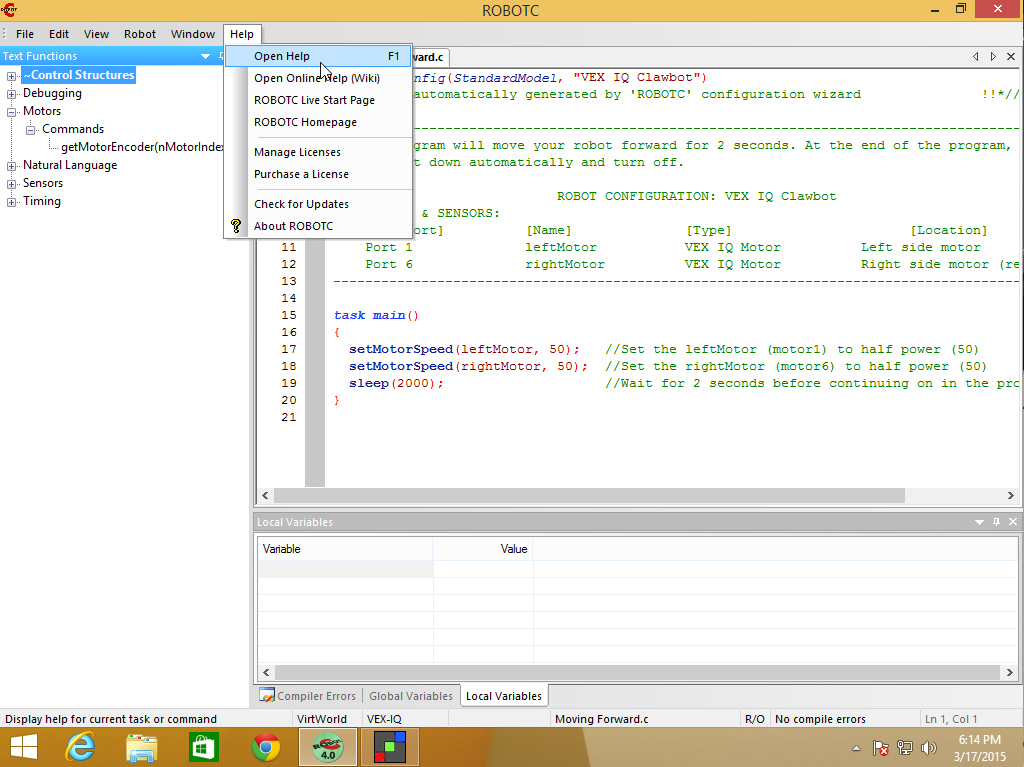
Yes, let’s figure out what function we can use. We’ll start with Help, you get to help in two ways:
- Pressing the function key F1
- Selecting Help menu and choosing Open Help
If this is the first time you’re opening up Help you might see the following dialog:
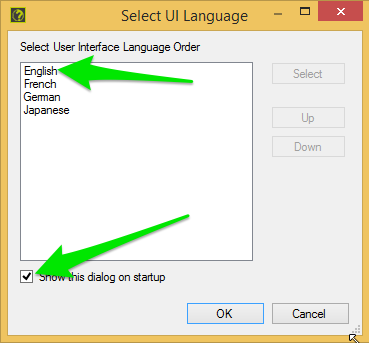
You’ll want to choose English and then uncheck the box Show this dialog on startup so you don’t have to choose English again.
If you’re not sure where to start, start with the Table of Contents (TOC) on the left hand side, you want to expand:
- Command Library - VEX IQ
- Text-Based ROBOTC
Since we’re worrying about moving, we need to look at Motors and Servos.
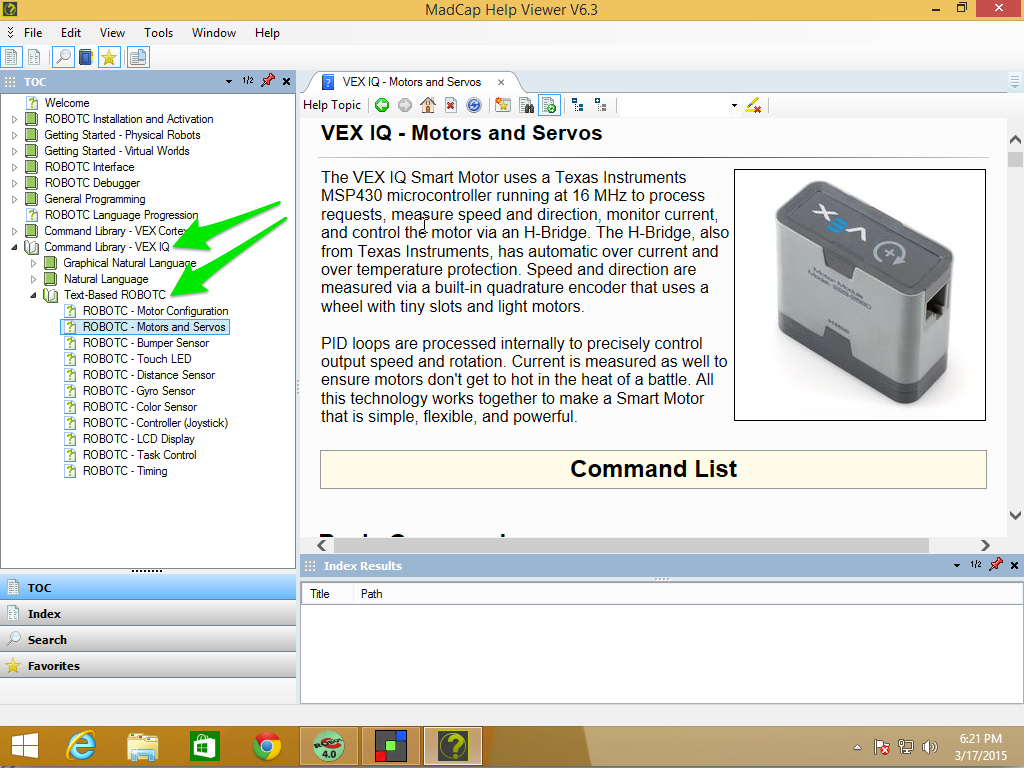
You can scroll through the help on the right to look for interesting functions, here are two that I think look promising:
moveMotorTargetThis command tells the robot to move a relative distance, it will add or subtract distance from any previously specified targets. It takes 3 parameters (the motor, the position in degrees, and the speed -100 to +100).setMotorTargetThis command tells the robot to move an absolute distance. It takes 3 parameters (the motor, the position in degrees, and the speed -100 to +100).
We’ll use setMotorTarget, but we need to change rotations into degrees.
void moveForward(float inches) { float circumference = 2.52 * PI; float rotations = inches / circumference; float degrees = rotations * 360; resetMotorEncoder(leftMotor); resetMotorEncoder(rightMotor); setMotorTarget(leftMotor, degrees, 75); setMotorTarget(rightMotor, degrees, 75); waitUntilMotorStop(leftMotor); waitUntilMotorStop(rightMotor); }
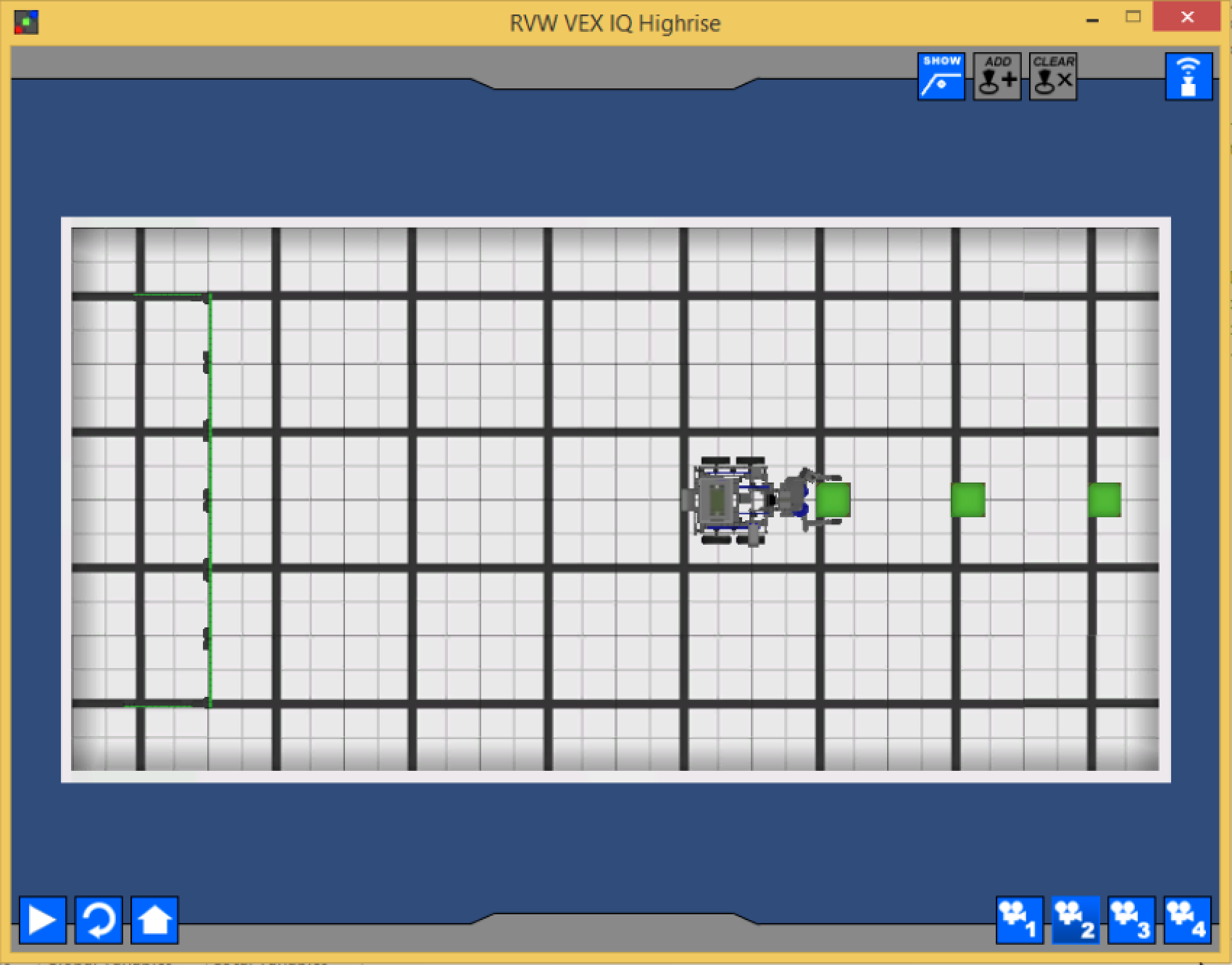
If you Compile and Download the program and then run it in Virtual Worlds (make sure you reset before you run) you should be stopped right at the first cube:
Reviewing moveForward
I have two issues with moveForward
The calculation of the circumference in the method
void moveForward(float inches) { float circumference = 2.52 * PI;
There are a couple things we could do here, but we’ll wait until later to deal with this.
The Magic Number 75
setMotorTarget(leftMotor, degrees, 75); setMotorTarget(rightMotor, degrees, 75);
So, Magic Numbers. These are numbers that look like they probably mean something but don’t do a good job of showing what they mean. In this case it’s motor power, so let’s make that a bit more obvious:
int motorPower = 75; setMotorTarget(leftMotor, degrees, motorPower); setMotorTarget(rightMotor, degrees, motorPower);
Making that change does a couple things for us. It makes it clear that 75 is the
motorPower, and it’s also clear what the parameters are for thesetMotorTargetfunction. It also reduces duplication, in a small way, letting us change power in one place and have it update both calls.
Raise the Arm
You’ll notice from the picture above that it looks like the robot grabbed the cube, and it did. That’s one of the things about Virtual Worlds and the VEX IQ Highrise game. Physics is hard to model so if the claw is at the cube, it’ll grab it. So we skip that step.
Our next step, according to the outline, is to “Raise the Arm”. We could really do this step in a few places:
- After we turn around, or
- When we get near the goal
I think it makes sense to raise it here, after we close our claw. It feels like what we would do if we, humans, were picking up a cube.
Raising the arm is just a movement, and any movement on the robot starts with a motor. So we need to find the arm motor and move it up, some number of degrees. If you have the instruction manual for the Clawbot, or you built your own robot, you’d know if there were gearing at the arm and which direction would raise the arm up or down. For us, we’ll experiment a bit.
Let’s start by adding the next step in task main() and stubbing out the method:
void raiseArm() { // implementation goes here }
task main() { moveForward(36); raiseArm(); }
Now let’s define the method:
void raiseArm() { int degrees = 90; int power = 75; resetMotorEncoder(armMotor); moveMotorTarget(armMotor, degrees, power); waitUntilMotorMoveComplete(armMotor); }
Let’s run the program and see how it works.
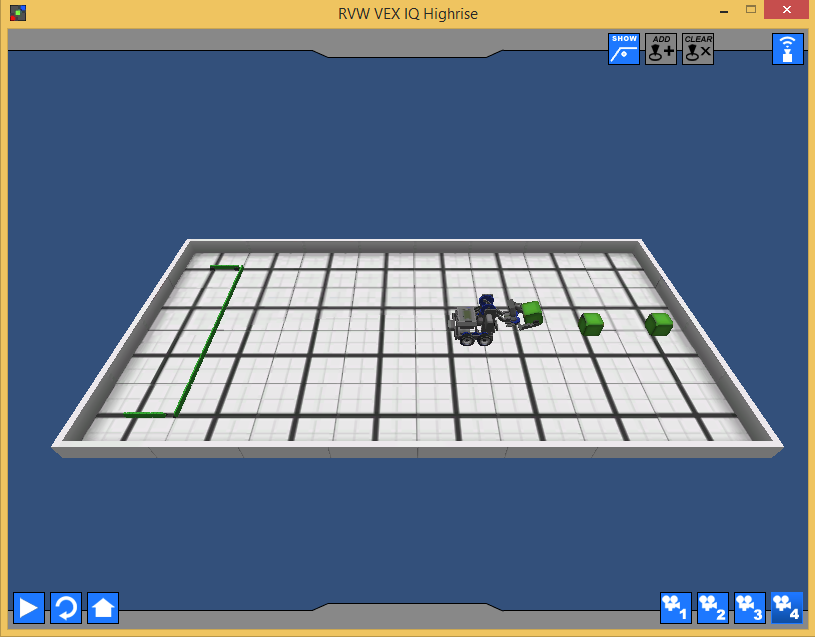
If you switch to view 4, like the image above, you can see we did raise the arm, but it doesn’t look like we raised it that much. Let’s change the degrees to 180 and see what that looks like.
void raiseArm() { int degrees = 180; int power = 75; resetMotorEncoder(armMotor); moveMotorTarget(armMotor, degrees, power); waitUntilMotorMoveComplete(armMotor); }
It definitely looks like we should be able to clear the goal, so let’s move on to the next step.
Turning Around
So, going back to our outline, the next thing we wanted to do was “Make a U-Turn”. If you don’t drive that essentially means turn back the way you came from. Another way to say that is make a 180° turn. It doesn’t matter if it’s left or right at this point, 180° will end up at the same place.
void turnLeft(int degrees) { // implementation goes here }
task main() { moveForward(36); raiseArm(); turnLeft(180); }
I just chose turnLeft(), we could have just as easily had used turnRight().